 |
Phoenix2D-Library
0.10
|
|
Phoenix2D-Library
0.10
|
Commands
The Commans lorem Ipsum
More...
#include <Commands.h>
Public Member Functions | |
| Commands (Connect *connect) | |
| ~Commands () | |
| void | flush () |
| void | move (double x, double y) |
| void | turn (double moment) |
| void | turnNeck (double moment) |
| void | dash (double power, double direction) |
| void | say (std::string message) |
| void | catchBall (double direction) |
| void | kick (double power, double direction) |
| void | tackle (double power, bool willToFoul) |
| void | pointTo (double distance, double direction) |
| void | changeView (std::string width) |
| void | moveObject (std::string object, double x, double y) |
| void | changeMode (std::string mode) |
| void | start () |
| void | recover () |
| int | sendCommands () |
Commands
The Commans lorem Ipsum
Definition at line 42 of file Commands.h.
| Phoenix::Commands::Commands | ( | Connect * | connect | ) |
Definition at line 38 of file Commands.cpp.
References Phoenix::commands_connect_ptr.
| Phoenix::Commands::~Commands | ( | ) |
Definition at line 42 of file Commands.cpp.
References Phoenix::Config::VERBOSE.
| void Phoenix::Commands::catchBall | ( | double | direction | ) |
Definition at line 119 of file Commands.cpp.
References Phoenix::CATCH, Phoenix::commands_history, and Phoenix::commands_to_send.
| void Phoenix::Commands::changeMode | ( | std::string | mode | ) |
Definition at line 175 of file Commands.cpp.
References Phoenix::CHANGE_MODE, Phoenix::commands_history, and Phoenix::commands_to_send.
Referenced by Phoenix::Trainer::execute().
| void Phoenix::Commands::changeView | ( | std::string | width | ) |
Definition at line 159 of file Commands.cpp.
References Phoenix::CHANGE_VIEW, Phoenix::commands_history, and Phoenix::commands_to_send.
Referenced by Phoenix::PlayOn::setup().
| void Phoenix::Commands::dash | ( | double | power, |
| double | direction | ||
| ) |
Definition at line 92 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, Phoenix::DASH, Phoenix::Server::MAXMOMENT, Phoenix::Server::MAXPOWER, Phoenix::Server::MINMOMENT, and Phoenix::Server::MINPOWER.
Referenced by Phoenix::Actions::goTo().
| void Phoenix::Commands::flush | ( | ) |
Definition at line 46 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::Config::COMMANDS_MAX_HISTORY, and Phoenix::Game::SIMULATION_TIME.
Referenced by Phoenix::PlayMode::onPreExecute().
| void Phoenix::Commands::kick | ( | double | power, |
| double | direction | ||
| ) |
Definition at line 129 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::KICK.
| void Phoenix::Commands::move | ( | double | x, |
| double | y | ||
| ) |
Definition at line 52 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::MOVE.
Referenced by Phoenix::BeforeKickOff::setup().
| void Phoenix::Commands::moveObject | ( | std::string | object, |
| double | x, | ||
| double | y | ||
| ) |
Definition at line 166 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::MOVE_OBJECT.
| void Phoenix::Commands::pointTo | ( | double | distance, |
| double | direction | ||
| ) |
Definition at line 149 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::POINT.
| void Phoenix::Commands::recover | ( | ) |
Definition at line 188 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::RECOVER.
Referenced by Phoenix::Trainer::execute().
| void Phoenix::Commands::say | ( | std::string | message | ) |
Definition at line 112 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::SAY.
Referenced by Phoenix::Trainer::execute().
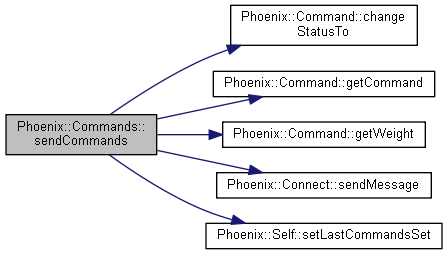
| int Phoenix::Commands::sendCommands | ( | ) |
Definition at line 194 of file Commands.cpp.
References Phoenix::Command::changeStatusTo(), Phoenix::commands_connect_ptr, Phoenix::commands_to_send, Phoenix::Command::getCommand(), Phoenix::Command::getWeight(), Phoenix::Connect::sendMessage(), Phoenix::SENT, and Phoenix::Self::setLastCommandsSet().
Referenced by Phoenix::Trainer::execute(), and Phoenix::PlayMode::onPostExecute().
| void Phoenix::Commands::start | ( | ) |
Definition at line 182 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::START.
| void Phoenix::Commands::tackle | ( | double | power, |
| bool | willToFoul | ||
| ) |
Definition at line 139 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, and Phoenix::TACKLE.
| void Phoenix::Commands::turn | ( | double | moment | ) |
Definition at line 62 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, Phoenix::Server::MAXMOMENT, Phoenix::Server::MINMOMENT, and Phoenix::TURN.
Referenced by Phoenix::Actions::goTo(), and Phoenix::BeforeKickOff::onPlayerExecute().
| void Phoenix::Commands::turnNeck | ( | double | moment | ) |
Definition at line 77 of file Commands.cpp.
References Phoenix::commands_history, Phoenix::commands_to_send, Phoenix::Server::MAXMOMENT, Phoenix::Server::MINMOMENT, and Phoenix::TURN_NECK.
 1.8.6
1.8.6